

カイコガ触角を搭載したバイオハイブリッドドローンによる匂い源定位に成功!
~ 匂い源探索アルゴリズム開発が可能な飛行プラットフォームの構築 ~
- プレスリリース
2021年3月18日
1.発表者
- 照月 大悟
- (東京大学先端科学技術研究センター 生命知能システム分野 特任助教)
- 内田 智也
- (東京大学工学部機械情報工学科 4年生)
- 福井 千海
- (東京理科大学理工学部応用生物科学科 4年生)
- 祐川 侑司
- (東京大学先端科学技術研究センター 生命知能システム分野 特任研究員)
- 岡本 有貴
- (産業技術総合研究所 センシングシステム研究センター 研究員)
- 神崎 亮平
- (東京大学先端科学技術研究センター 生命知能システム分野 教授)
2.発表のポイント
- 危険物質探知や災害現場での捜索活動などに応用が期待される、匂いの発生源に高速・高効率に到達する技術の開発を、昆虫触角を活用することで実施した。
- カイコガ触角(注1)と小型ドローンを融合することにより、気中の匂い物質を高感度に検出して匂い源に到達する自律型バイオハイブリッドドローンの開発に成功した。
- センサ部に筒状の囲いを設置することで、ドローンが匂いの飛来方向に対するセンサ指向性を向上させ、より高度な匂い源探索アルゴリズムの実装が可能となった。
3.発表概要
近年、危険物質やガス漏れなどの検出に向け、ドローンにガスセンサを搭載して匂い源探索を行う研究が進められています。しかし、既存のガスセンサは匂い物質の検出や匂い源探索に十分な性能を持っていません。昆虫触角は、環境中に漂う匂い物質を高感度、高選択、リアルタイムに検出可能な匂いバイオセンサとして機能することが知られていますが、昆虫触角を搭載したドローンの先行研究では、飛行性能が十分でなく、また、風洞など限定された環境でのみ検証が実施されていました。東京大学先端科学技術研究センターの照月大悟特任助教、神崎亮平教授らの研究グループは、カイコガ触角と小型ドローンを融合することで、匂い源探索が可能なバイオハイブリッドドローンの構築に成功しました。本成果により、ドローンは匂いの飛来方向を認識して、風洞外の環境でも、回転運動を含む高度な匂い源探索アルゴリズムを実装することが可能となりました。
本研究の成果は、2021年3月18日に科学雑誌Sensors and Actuators B: Chemicalオンライン版に掲載されました。
4.発表内容
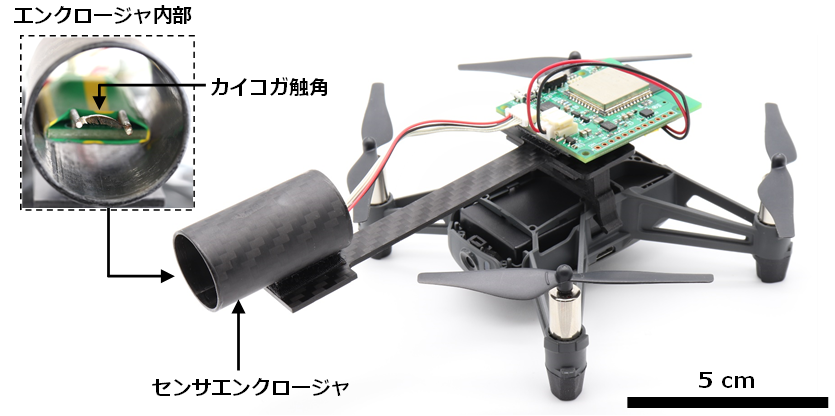
空気中の匂い物質検出とその発生源に到達する技術は、屋内外の環境モニタリングや、公共空間のセキュリティモニタリング、災害現場での捜索活動などに応用できる可能性を秘めています。本研究では、カイコガ触角と小型ドローンを融合したバイオハイブリッドドローンを構築しました。匂い源定位のためには気中の匂い物質を高感度、高選択、リアルタイムに検出するセンサが必要となります。昆虫は優れた嗅覚機能を持っており、これらを活用することで既存のガスセンサを超える匂い物質検出性能を得ることができます。研究チームでは、メスの性フェロモン(ボンビコール(注2))を高感度、高選択的に検出するカイコガに着目しました。カイコガの触角を切り取り、触角電図(EAG)(注3)と呼ばれる手法によって、触角のボンビコールに対する応答を電気信号として検出しました。ペイロードの限られる小型ドローンにEAGを搭載するため、小型EAGデバイスを開発しました。これは、バッテリーを含めた重量が15g程度と軽量なデバイスです。ドローンには、安定した飛行を可能とするためTello EDU(Shenzhen Ryze Technology製)を使用しました。カイコガ触角に基づく小型EAGデバイスをTello EDUに搭載することで、気中の匂い物質を検出可能な自律型バイオハイブリッドドローンの構築に成功しました(図1)。
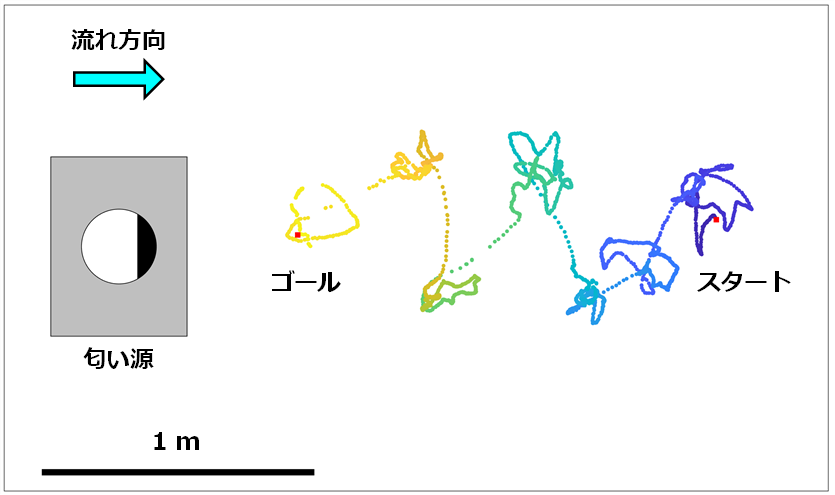
次に、構築したバイオハイブリッドドローンを用いた匂い源定位実験を実施しました。自然環境では、匂い物質は風や地形の影響を受けて不連続に分布し、時々刻々と変化します。このような状況下で匂い物質を検出して匂い源に定位するためには、匂い物質の濃度と飛来方向をリアルタイムに検出し続けながら探索を行うことが求められます。先行研究では、単純なジグザグ移動よりも、回転運動と直進運動を組み合わせたスパイラルサージアルゴリズムの方が、効率的な匂い源探索に有効であることが示されています。しかし、ドローンにスパイラルサージアルゴリズムを実装して匂い源探索を行うと、ドローンが匂い源と逆方向を向いた状態でも高い匂い応答が検出され、匂い物質の飛来方向が認識できないという問題が発生しました。そこで、小型EAGデバイスを研究グループが考案したセンサエンクロージャ(注4)で覆うことにより、デバイスのセンサ指向性を向上させ、ドローンが匂い源に対する前後方向を認識できる手法を構築しました。実験では、電磁弁の制御によって間欠的に放出されるボンビコールを匂い源としました。センサエンクロージャを設置したドローンは、回転運動中に連続的に匂い応答を検出して、その中の最大値が出た方向に直進するという動作を繰り返しました。その結果、探索開始時に匂い源の方向が不明な場合であっても、ドローンは自律的に方向修正を繰り返して匂い源定位に成功しました(図2)。
今回研究チームでは、風洞外に疑似的な実環境中を構築して、カイコガ触角に基づくバイオハイブリッドドローンが、匂い物質の濃度と飛来方向をリアルタイムに認識しながら匂い源定位を行うことに世界で初めて成功しました。開発したセンサエンクロージャは、ペイロードが小さいドローンにも容易に設置することができ、匂い源探索アルゴリズムの幅を大きく拡張することが可能となりました。カイコガは、遺伝子組換えによって他種の昆虫の性フェロモンに応答することが示されており、将来的にはカイコガフェロモン以外を検出対象としたバイオハイブリッドドローンの開発につながると期待されます。
5.発表雑誌
雑誌名:「Sensors and Actuators B: Chemical」
論文タイトル:Real-time odor concentration and direction recognition for efficient odor source localization using a small bio-hybrid drone
著者:Daigo Terutsuki, Tomoya Uchida, Chihiro Fukui, Yuji Sukekawa, Yuki Okamoto, Ryohei Kanzaki
DOI番号:10.1016/j.snb.2021.129770
6.問い合わせ先
生命知能システム分野 教授 神崎 亮平(かんざき りょうへい)
生命知能システム分野 特任助教 照月大悟(てるつき だいご)
7.用語解説
- (注1)カイコガ触角:カイコガ(Bombyx mori )の頭部からハサミで切り取った触角。実験条件に依存するが、触角電図(注3)を用いることにより、頭部から切り取った後1~2時間程度は、匂いに対する応答を電気信号として検出することができる。
- (注2)ボンビコール:カイコガの性フェロモン。オスのカイコガはボンビコールを高感度・高選択的に検出することができる。また、オスのカイコガはボンビコールのみでメスに定位する行動を引き起こすことが知られている。
- (注3)触角電図:Electroantennogram(EAG)とも呼ぶ。昆虫触角の両端に電極を配置して、触角が匂い物質などで刺激された際の電位差を計測する手法。
- (注4)センサエンクロージャ:カーボンに基づく軽量な筒型の囲い。
8.添付資料
関連タグ
