

動画による研究紹介 昆虫操縦型ロボット
生命知能システム分野 神崎研究室
- 先端研ニュース
2020年3月13日
昆虫の適応能力を解明するために、昆虫自身がロボットを操縦する昆虫操縦型ロボットを開発した。
ボール上の雄カイコガは、雌の性フェロモンを受容すると探索行動を開始し、自身の歩行運動によってボールを回転させる。
ボールの回転は光学センサで読み取り、ロボットの運動へ変換される。
昆虫-操縦型ロボットは、カイコガと同様ににおい(フェロモン)源に向かって定位する。
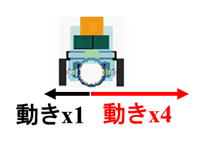
図1:ロボットのモータのゲインを非対称に設定した。

図2_1:前方を透明のシートでカバーし見える状態で運転

図2_2:前方を紙でカバーし見えない状態で運転
ロボットのモーターのゲインを非対称に(1:4)に制御した。この条件では、カイコガが直進しても左に旋回することになる。
紙でカバーした条件(図2_1)では、カイコガは回転するばかりだが、前方を見ることのできるカイコガ(図2_2)は、
ロボットの異常な動きを検知し、匂い源に向けて定位できるようにロボットの動きを補正する。
このようにカイコガにとって不自然な状況を作り出しても、カイコガは視覚情報をもとに補正を行い、フェロモン源へたどり着くことが示された。
関連タグ
