
動画による研究紹介 サイボーグ昆虫
生命知能システム分野 神崎研究室
- 先端研ニュース
2020年3月16日
昆虫(カイコガ)の脳内の前運動中枢で形成された、匂い源探索の行動を生成する行動指令信号と考えられるフリップフロップ(FF)応答や一過的興奮(BE)応答は,頸の回転をおこす運動神経(頸運動神経に)伝達されることから,頸運動神経から計測した神経信号により,移動ロボットを制御することを考えた。もし,こららのFF応答やBE応答が匂い源探索の行動指令信号であるならば、これらの信号で移動ロボットを制御すれば、ロボットは匂い源探索するはずである。
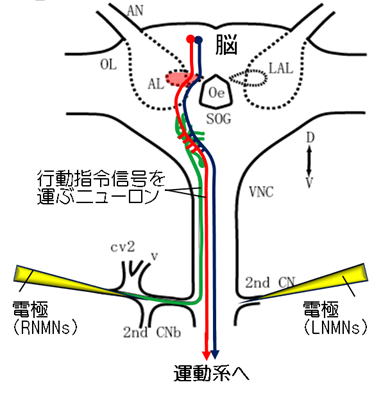
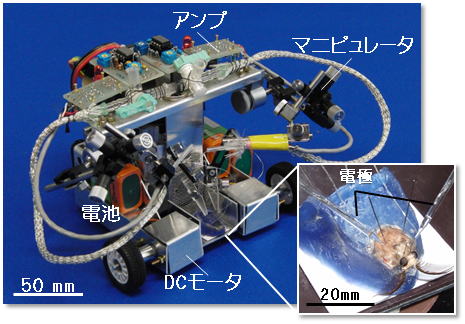
左右の頸運動神経から、吸引電極を用いて神経信号を計測する。
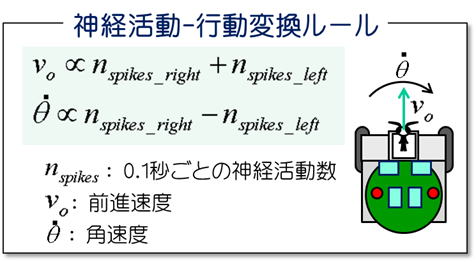
左右の頸運動神経の神経活動の総計に、角速度は、差分に比例するというルールを作成した。
これにより、ロボットに動作指令を与えた。
風洞内をフェロモンに向かって移動するサイボーグ昆虫
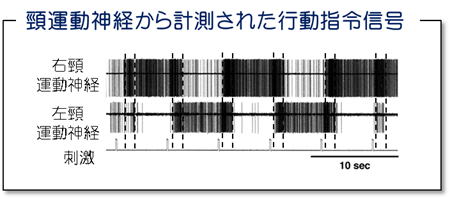
左右の頸運動神経から計測した神経活動。赤色は左、白色は右頸運動神経からの記録。
左右の頸運動神経の0。1秒毎の発火数をプロットしたグラフ。赤色は左、白色は右頸運動神経からの記録。
神崎研究室ホームページより転載
http://www.brain.rcast.u-tokyo.ac.jp/research/cyborg_insect.html
関連タグ
