

「拡張される身体」原田研究室編 広報誌『RCAST NEWS』
114号掲載
- 先端研ニュース
2021年11月22日
テクノロジーの進化によって、顔認証や電子決済、そしてさまざまなオンラインサービスが開発され、社会環境が大きく変わっています。実は、私たちの身体にもこの大きな変化が起こります。サイボーグやアバターなど、テクノロジーによって人間の身体能力、認知および知覚能力が拡張されるとき、そこにある未来の社会とは? 人が、身体や空間、時間などさまざまな制約から解放された社会の鍵を握る2つの研究プロジェクトをご紹介します。
人間を制約から解放する
ムーンショット研究開発事業※
誰もが自在に活躍できるアバター共生社会の実現
人間の知識・概念獲得の研究開発(2020年12月1日~2025年11月30日)
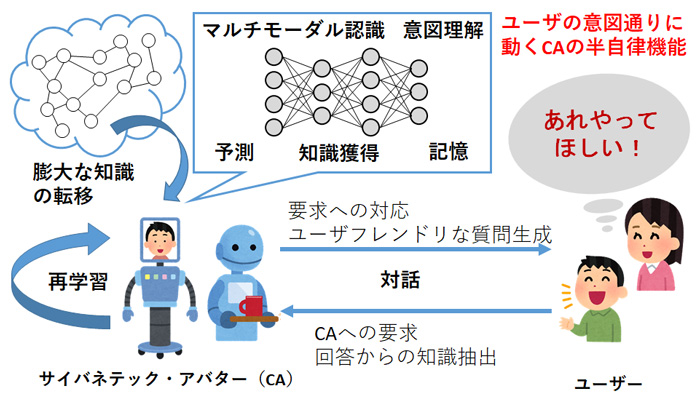
3D映像などで使われるアバター(分身)に加え、遠隔操作で自分の身体と同じように身体能力や認知能力、知覚能力などの感覚を共有でき、サイバーとフィジカルが融合した空間で自由自在に活躍できる身代わりロボットを「サイバネティック・アバター(CA)」と呼びます。
この研究開発事業の主要課題の一つとして、CAの高度な認識能力、CA間での知識共有、操作者の意図理解に必要となる人間の知識や概念の獲得について研究開発を行っています。
CAの自在化には、人間に近い形で環境やタスクに関する知識と概念を獲得する技術が必要です。この知識と概念の獲得には、視覚情報に人間レベルの知識や概念を組み合わせ、さらに感情や視線等の多様なモダリティ(話している内容に対する話し手の判断や感じ方)の情報を組み合わせる必要があります。CAが操作者や利用者の意図を理解することができるようになるために、自在化した遠隔操作における操作者の反応を取り込み、少ないデータでも学習可能な新たな深層学習等を開発し、人間に近い認知機能を持つと共に操作者の意図を適切に理解できるCAの開発と、操作者がCAを通して利用者と概念を共有しながら自然に関わることができる技術開発を行います。
ムーンショット型研究開発事業※
2050年までに、人が身体、脳、空間、時間の制約から解放された社会を実現するため、サイボーグやアバターとして知られる一連の技術を高度に活用し、人の身体的能力、認知能力及び知覚能力を拡張するサイバネティック・アバター技術を、社会通念を踏まえながら研究開発を推進するプロジェクト。「誰もが自在に活躍できるアバター共生社会の実現」では、利用者の反応をみて行動するホスピタリティ豊かな対話行動ができる複数のCAを自在に遠隔操作して、現場に行かなくても多様な社会活動(仕事、教育、医療、日常等)に参画できる社会の実現を目指します。
概念理解とマルチモーダル認識の研究開発
-

人との対話を通じて実環境の面白いイベントの知識を収集するロボットシステム
-
人との相互作用で得る多様な入力情報から学習し判断できるCAのために
私たちが生活する実環境において、あらかじめ予想ができない不確実な出来事が頻繁に起こります。本プロジェクトでは、そのような予想困難な環境においても、CAが半自律的に活躍するためのマルチモーダル認識を通じた概念理解の研究開発を行います。
人が生活する実世界では知っていることよりも知らないことの方が圧倒的に存在します。CAを人間社会に展開する状況では、「知らないこと」や「できないこと」を知らないまま、できないまま放置するのではなく、それらを「知らない」「できない」と自覚して、知識や技能を自動的に獲得し学習し続けることが必要となります。そのため、CAの未知・新規な状況を、例えば画像から顔認識、音声からテキストに変換、など1つの入力情報ではなく、人間が判断するときのように複数の入力情報「マルチモーダル情報」から判断する技術開発を行います。
また、未知・新規な状況や物体を発見した次の段階として、未知物体や状況に関する情報の獲得が必要となります。本プロジェクトでは、この情報を獲得するために人との相互作用による多面的な情報収集「マルチモーダルインタラクション」により実現します。
さらに、回答から得られる知識の量は多くはないため、少数の教師情報からAIに知識や概念を効率的に構築する手法が求められます。そこで、少数の教師データでも高精度に知識や概念を更新可能な手法を開発します。
因果推論と予測機能の研究開発
-
![図1.提案したベイズ因果モデル[Mukuta & Harada, 2014]](/content/000016411.jpg)
図1.提案したベイズ因果モデル[Mukuta & Harada, 2014]
![図2.提案した人骨格予測モデル [Fushishita et al., 2020]](/content/000016412.jpg)
図2.提案した人骨格予測モデル [Fushishita et al., 2020]
-
動作を予測して多数のCAが協調して動くモデルを開発しCAの操作者をサポートする
この研究では、CAの操作履歴の時系列から時系列間のお互いに影響を及ぼす度合いである因果関係の推定や時系列の未来予測を行うことで、CAの操作者を補助するシステムの作成を目指しています。
現在まで、系列間の関係性を推定の不確かさも含めて計算を行う「ベイズ推定」を活用してモデル化を行うことで、時系列データが短いものでも安定して時系列間の因果関係の推定を行う手法を提案しました(図1)。また、人の動作の履歴から将来の動作を予測して提示する課題では、人の将来の動作には多様性があるため、単一の動作の予測ではなく、抽象的/主観的に行う幅広い動作要素を踏まえた「潜在コード」を活用することで、多様な人骨格の予測を行うモデルを提案しました(図2)。
これらの研究で培ってきた技術を発展させ、多数のCAが協調して動作を行うような多次元の時系列をモデル化する状況においても、効率的に時系列のモデル化や未来予測を行うためのモデル開発を目指します。
意味理解コーパスの研究開発
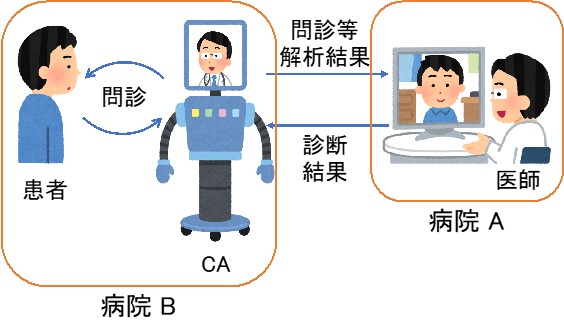
図3
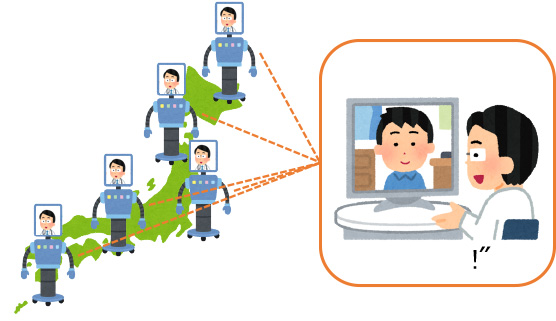
図4
-
医師不足の医療現場でCAが医師を支援一度に複数患者の診断を可能に
このグループでは主に医療分野をターゲットに研究を行っています。医療の現場ではしばしば医師不足が問題になります。例えば、都市部と地方では人口あたりの医師の数には大きな格差があります。現在は医師の限られたリソースを酷使することで対処しているのが実情ですが、それでも解決してはいません。この研究では、医師がCAを利用して診断を行うことで、この負担の軽減することを試み、医師と患者の間に入って医師の診断の支援を行うシステムの開発に取り組んでいます。
具体的には、患者が遠隔地などにいる場合でも、CAが患者と対面してコミュニケーションを取ることで、問診など診断に必要な情報の収集と解析を行います(図3)。その解析結果と情報を医師に送信することで、医師は患者と離れた場所に居ながら診断を行うことができます。また、医師が最終的な診断を下すことのみを行うことにより、診断のプロセスにかかる労力を削減することが可能になります。これによって一度に様々な場所の複数の患者を診断することが可能となり(図4)、医師不足の解消につながることが期待されています。
関連タグ

サイバネティック・アバター生活とは?
私たちが、自分の分身を複数持って、それらが自分の代わりに仕事をしてくれたらどうでしょう?遠くの場所に自分自身が行かなくても作業ができたり、複数の分身が同時に作業を行うことで早く仕事が片付いたり、自分よりもデキる分身を持つことが出来たら、自分ではできなかった目標も達成可能かもしれません。
大阪大学の石黒浩教授がPMとなる本プロジェクトでは、多様な価値観やバックグラウンドを有する人々が、仕事、学業、日常生活における様々な活動に障壁なく参画できる社会を目指して、人の身体的能力、認知能力及び知覚能力を拡張するサイバネティック・アバター(CA)技術を開発するものです。
特に我々の研究グループでは、このCAの認識能力や操作者の意図理解に必要となる、人の知識や概念の獲得に関する基盤的な研究開発を行っていきます。
グループリーダー 原田 達也 教授(マシンインテリジェンス分野)